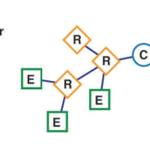
XBeeでZigBeeネットワークを構築するために、まずはネットワークの構成(コーディネータ、ルータ、エンドデバイス)を理解しましょう。また、モジュールの各種設定はXCTUというS/Wで書き込みます。このS/Wの使い方についても説明します。 ZigBeeネットワーク イーサネットネットワークと同様に、ZigBeeネットワークは、定義されたネットワークスタックに基づいて、スタック内の各レイヤがデータメッセージの特定の返還を担当します。 また、他のネットワークと同様にZigBeeネットワークは、メッセージルーティング、アドホックネットワークの作成、自己修復メッシュトポロジをサポートしています。これらの機能を利用するために、無線アドレスとPANアドレスが必要になります。 メッシュトポロジでは、各ノード(ここではXBeeモジュール)にネ … [もっと読む...] about XBee無線ネットワーク:ZigBeeネットワーク概要とモジュール設定(XCTU)
XBee無線ネットワーク:XBeeモジュールの接続と設定

XBeeを接続するために、変換基板・ドングル・シールドを一般的に使用します。XBeeモジュールのピンは20ピンあり、それぞれの機能割り当てについて説明します。また、ネットワーク設定をする際に重要なのがアドレスです。このアドレスの役割についても解説します。 XBee-ZBモジュールとの接続 XBeeモジュールについて調べてみると、スルーホールタイプの出入力ピンが、通常ブレッドボードで使用する電子部品よりも小さくなっている、ということに気付きます。一般的にブレッドボードで使用できる電子部品のピン間隔は2.54mmやその倍数になっていますが、XBeeモジュールのスルーホールモデルでは2mmになっています。 このため、ブレッドボードや一般的な穴間隔2.54mmのユニバーサル基板で使用する場合には、ピン間隔を変換するための基板が必要になります。 … [もっと読む...] about XBee無線ネットワーク:XBeeモジュールの接続と設定
XBee無線ネットワーク:XBeeモジュールの選び方

XBeeを初めて学ぶにあたり、XBeeとは何かについて説明します。また、XBeeは様々な種類があるので、目的に合った製品を選択できるように、どのようなモジュール(シリーズ1~3、スタンダード、プロ)やアンテナの種類があるかについて説明します XBeeとは XBeeは無線を使用したデータ通信を行うモジュールです。2.4GHzの電波を用いて、独自のプロトコルでモジュール同士の通信を行います。 XBeeモジュールは非常に小さく、大きな切手ほどの大きさしかありません。計測用センサユニットのような小さなものにも無理なく組み込めます。また、低消費電力で動作するのも特徴で、スリープモードの設定をすればさらに消費電力を削減できます。 XBeeモジュールはマイクロコントローラではありませんが、ごく簡単な処理ならば行うことができます。スリープ機能も … [もっと読む...] about XBee無線ネットワーク:XBeeモジュールの選び方
Raspberry Pi はじめてのラズパイ:サーボモータを制御する

モーターのシャフトの回転角度を正確に制御したい場合には、サーボモーターも使用できます。サーボモーターは電子制御回路とシャフトの位置を検出するための部品が内蔵されており、どの位置にいても間違いなく目的の位置に移動させることができます。モーターが自分で基準点を持っているので、基準点のスイッチや外付けのセンサーがなくても位置を判断できます。 サーボモーターの原理 サーボモーターはここまでで紹介したモーター(ブラシ付き/ブラシレスモータ、ステッピングモータ)とは異なり、連続回転させることができません。多くのサーボモーターはシャフトを0~180°の範囲で回転させる仕様になっています。(一部、図1のSG90-HVのように連続回転させられるサーボモーターもあります。) メーターの針や自動車のワイパー、踏切の遮断機のように、同じ範囲を行ったり来た … [もっと読む...] about Raspberry Pi はじめてのラズパイ:サーボモータを制御する
Raspberry Pi はじめてのラズパイ:ステッピングモータをA4988ドライバで制御する
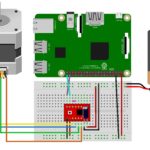
ステッピングモーターの原理 前回の記事で紹介したモーターは、電気エネルギーを回転運動に変換するように作られたものです。シャフトの回転速度は制御しやすいですが、角度にして何度回転させるかという制御や、正確に何回転させるといった制御は難しく、精度を求めるのも難しいという問題があります。 「正確に〇度回転させる」場合や「正確に何回転させる」場合には、ステッピングモーターを使用します。ステッピングモーターは正確な角度で回転させることができ、停止した位置でブレーキをかけておくこともできます。 こうした回転制御を行うために、ローターの永久磁石とステーターの電磁石が歯車のように細かく作られていて、ローターの磁石とステーターのコイルとは円周上の同じ位置にはなく、わずかにずらして配置されています。 ステーターのコイルのうち一つに電流が流れると … [もっと読む...] about Raspberry Pi はじめてのラズパイ:ステッピングモータをA4988ドライバで制御する