
ラズパイがどのようなきっかけで誕生したのか、なぜここまで普及するようになったのか、これまでに発売された多種類のラズパイモデルの違いは何か、ということについて説明します。初めてラズパイを触る際のモデル選びの参考にもなると思います。 誕生のきっかけ 2000年代に入って数年が経ったころ、イギリスにあるケンブリッジ大学のコンピュータサイエンスコースへの入学者数は、それまでの1/3にまで減少していました。 この状況を打開して入学者数を増やすため、また子供たちにコンピュータに興味を持ってもらうために、エバン・アプトン氏が率いるグループが安価なシングルボードコンピュータの開発に着手しました。 エバン・アプトン氏のグループは、のちにRaspberry Pi財団の共同創立者としてRaspberry … [もっと読む...] about Raspberry Pi はじめてのラズパイ:歴史と各種モデル
Arduino初心者編:SPI通信によるArduino間のデータ送受信
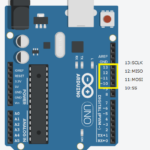
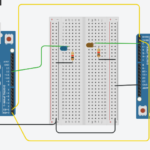
今回は2つのArduino間でSPIによるデータ送受信プログラムを紹介します。前回紹介したI2Cと同様に、クロック信号を持ち、シリアル通信と比べてノイズに強い通信方式です。ArduinoでSPI通信をするためのポートやライブラリの使用方法などについて説明します。 SPI通信の概要 マイコンレベルのデータ通信インタフェースとして、SPI(Serial Peripherial Interface)は1987年に開発されました。I2Cと同様に、コンポーネントはマスターかスレーブの役割を持ちます。マスターはクロック信号(シリアルクロック-SCL)を生成します。このクロックのタイミングに合わせてデータ通信を行います。ただし、I2Cバスとは異なり、データの送受信それぞれを専用の通信線で行います。マスターからスレーブの方向の通信線MOSI(Master … [もっと読む...] about Arduino初心者編:SPI通信によるArduino間のデータ送受信
Arduino初心者編:I2C通信によるArduino間のデータ送受信

前回紹介したシリアル通信はクロック信号がないため、ノイズによる干渉の影響を受けやすいという欠点があります。これを改善するため、フィリップスという会社がI2Cインタフェース(「アイスクエアドシー」または「アイツーシー」と読みます)を開発しました。今回は2つのArduino間でI2Cによるデータ送受信プログラムを紹介します。 I2Cの概要 I2Cは「Inter-Integrated … [もっと読む...] about Arduino初心者編:I2C通信によるArduino間のデータ送受信
Arduino初心者編:シリアル通信によるArduino間のデータ送受信
汎用の入力端子・出力端子は扱い易いですが、複雑なデータ(センサの測定値や液晶画面に表示するテキストなど)を送受信することは簡単ではありません。Arduinoには複雑なデータを送受信するための通信インタフェースがいくつか装備されています。今回は、その中でも一番基礎的なシリアル通信の通信方式やプログラミング方法について紹介します。 概要 シリアルインターフェースはコンピュータ同士がデータの送受信を行う最も古い方法の一つで、1960年代に開発されました。 RS-232(RS - … [もっと読む...] about Arduino初心者編:シリアル通信によるArduino間のデータ送受信
Arduino初心者編:サーボモータとステッピングモータの動作原理と制御方法
アプリケーションによっては、モータ回転軸の位置を正確に調整する必要がある物もあります。そこで登場するのがサーボモータとステッピングモータです。工作機械や産業用ロボットによく使用されています。これらのモータを簡単に制御できるICやライブラリの使い方を説明します。 サーボモータ 自動車模型のステアリングや模型飛行機の翼部分位置の事を想像してみて下さい。飛行機の翼はサーボモータの代表的な用途です。サーボモータは、モータ軸を特定の角度に正確に制御できる特徴持っています。 サーボモーターとは、制御部と駆動部の組み合わせの物で内部には、ギアを介して出力軸を駆動する直流モータがあります。電子制御ユニットは、角度センサーの出力値と外部から指定された設定値を比較し、自分の望む位置になるようにモータ部分を制御します。このフィードバック技術の利点は、通常の … [もっと読む...] about Arduino初心者編:サーボモータとステッピングモータの動作原理と制御方法