
モーターのシャフトの回転角度を正確に制御したい場合には、サーボモーターも使用できます。サーボモーターは電子制御回路とシャフトの位置を検出するための部品が内蔵されており、どの位置にいても間違いなく目的の位置に移動させることができます。モーターが自分で基準点を持っているので、基準点のスイッチや外付けのセンサーがなくても位置を判断できます。 サーボモーターの原理 サーボモーターはここまでで紹介したモーター(ブラシ付き/ブラシレスモータ、ステッピングモータ)とは異なり、連続回転させることができません。多くのサーボモーターはシャフトを0~180°の範囲で回転させる仕様になっています。(一部、図1のSG90-HVのように連続回転させられるサーボモーターもあります。) メーターの針や自動車のワイパー、踏切の遮断機のように、同じ範囲を行ったり来た … [もっと読む...] about Raspberry Pi はじめてのラズパイ:サーボモータを制御する
サーボモータ
Arduino初心者編:サーボモータとステッピングモータの動作原理と制御方法
アプリケーションによっては、モータ回転軸の位置を正確に調整する必要がある物もあります。そこで登場するのがサーボモータとステッピングモータです。工作機械や産業用ロボットによく使用されています。これらのモータを簡単に制御できるICやライブラリの使い方を説明します。 サーボモータ 自動車模型のステアリングや模型飛行機の翼部分位置の事を想像してみて下さい。飛行機の翼はサーボモータの代表的な用途です。サーボモータは、モータ軸を特定の角度に正確に制御できる特徴持っています。 サーボモーターとは、制御部と駆動部の組み合わせの物で内部には、ギアを介して出力軸を駆動する直流モータがあります。電子制御ユニットは、角度センサーの出力値と外部から指定された設定値を比較し、自分の望む位置になるようにモータ部分を制御します。このフィードバック技術の利点は、通常の … [もっと読む...] about Arduino初心者編:サーボモータとステッピングモータの動作原理と制御方法
Raspberry Pi カメラのパン・チルトをサーボで遠隔制御する

カメラのパン・チルト(上下・左右方向に首を振る)をサーボモータ2個で制御します。さらに、この制御をスマホのアプリからジョイスティックのインターフェースでWiFi通信で遠隔制御する方法を解説します。カメラの基本的な使用方法は前回記載しましたので、そちらを参照してください。 環境 ハード ラズパイ本体Raspberry Pi4 ModelB 4GB 技適対応品カメラRaspberry Pi Camera Module V2 カメラモジュールパン・チルトキットPan Tilt HAT サーボ制御のボードSparkFun Pi Servo HAT (PCA9685)バッテリAnker Power Core Fusion 5000 ソフト OSRaspbian Buster with desktop and … [もっと読む...] about Raspberry Pi カメラのパン・チルトをサーボで遠隔制御する
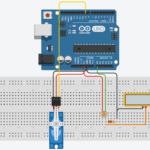
ArduinoでSTEM教育 基礎編:サーボ

今回は、Arduinoでサーボを制御する方法を紹介します。 目次 使用する部品一覧サーボの特徴や取り扱い方法回路図配線図組立完成写真プログラム動かしてみよう今回学んだポイント改造してみよう 使用する部品一覧 使用する部品は図のとおりです。これらの部品は、すべて「ELEGOO Arduino用のMega2560スタータキット」に含まれています。Arduinoは、もちろんunoやnanoでも問題ありません。 Arduino MEGA2560 … [もっと読む...] about ArduinoでSTEM教育 基礎編:サーボ