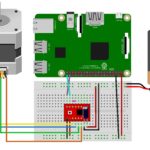
ステッピングモーターの原理 前回の記事で紹介したモーターは、電気エネルギーを回転運動に変換するように作られたものです。シャフトの回転速度は制御しやすいですが、角度にして何度回転させるかという制御や、正確に何回転させるといった制御は難しく、精度を求めるのも難しいという問題があります。 「正確に〇度回転させる」場合や「正確に何回転させる」場合には、ステッピングモーターを使用します。ステッピングモーターは正確な角度で回転させることができ、停止した位置でブレーキをかけておくこともできます。 こうした回転制御を行うために、ローターの永久磁石とステーターの電磁石が歯車のように細かく作られていて、ローターの磁石とステーターのコイルとは円周上の同じ位置にはなく、わずかにずらして配置されています。 ステーターのコイルのうち一つに電流が流れると … [もっと読む...] about Raspberry Pi はじめてのラズパイ:ステッピングモータをA4988ドライバで制御する
ステッピングモータ
Arduino初心者編:サーボモータとステッピングモータの動作原理と制御方法
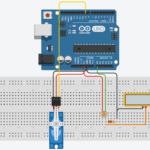
アプリケーションによっては、モータ回転軸の位置を正確に調整する必要がある物もあります。そこで登場するのがサーボモータとステッピングモータです。工作機械や産業用ロボットによく使用されています。これらのモータを簡単に制御できるICやライブラリの使い方を説明します。 サーボモータ 自動車模型のステアリングや模型飛行機の翼部分位置の事を想像してみて下さい。飛行機の翼はサーボモータの代表的な用途です。サーボモータは、モータ軸を特定の角度に正確に制御できる特徴持っています。 サーボモーターとは、制御部と駆動部の組み合わせの物で内部には、ギアを介して出力軸を駆動する直流モータがあります。電子制御ユニットは、角度センサーの出力値と外部から指定された設定値を比較し、自分の望む位置になるようにモータ部分を制御します。このフィードバック技術の利点は、通常の … [もっと読む...] about Arduino初心者編:サーボモータとステッピングモータの動作原理と制御方法