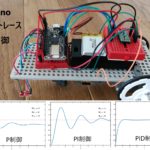
前回作成したライントレースカーはガタガタ走行でした。今回は、自動制御でよく用いられるPID制御で、ラインに対して滑らかな走行ができるようにプログラムします。難しそうに感じるかもしれませんが、実際にモノを作ってみると理解度が断然上がります。 使用する部品一覧 使用する車は、前回の記事(ArduinoでSTEM教育 実践編:ライントレースカー)で作成したものを使用します。 電子部品の説明、回路図、ブレッドボード図はこちらを参照してください。 PID制御とは 前回作成したライントレースカーは、左右のフォトリフレクタがラインを検出する/しないの2値で、車の進行方向を制御していました。単純な制御なので理解しやすいですが、車はガタガタ走行になってしまいます。滑らかに走行するためには、フォトリフレクタのライン検出をアナログ値で取得して、 … [もっと読む...] about ArduinoでSTEM教育 実践編:ライントレースカーをPID制御する